Robot Sockey Competition
|

|
Contest Description
The robot contest requires students to build a self-propelled, autonomous, sensing robot designed to compete in the Robo Sockey Game.
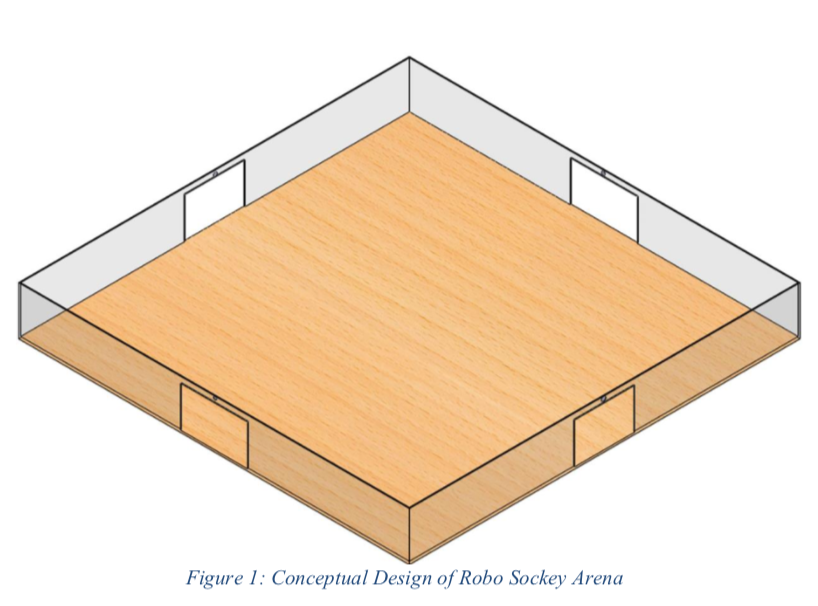
The area will be white paper/ board background on a square wood foundation, ~6’x~6’with four goals; one on each side. Each goal will have a line path on the floor leading to it and a target above it that can be identified with distance sensors or IR sensors. This will give the robots two ways to find the goal. The robots can drive to the goal or shoot the ball. The walls are approximately 1 ft tall plywood. A conceptual design of the arena is shown in Figure 1.
The area will be white paper/ board background on a square wood foundation, ~6’x~6’with four goals; one on each side. Each goal will have a line path on the floor leading to it and a target above it that can be identified with distance sensors or IR sensors. This will give the robots two ways to find the goal. The robots can drive to the goal or shoot the ball. The walls are approximately 1 ft tall plywood. A conceptual design of the arena is shown in Figure 1.
The robots start in the center of the arena, on the centerline, facing the goal. The back surface of the robot must be aligned with the center mark of the arena. There will be 3 balls initially placed in each quadrant of the arena for a total of 12 balls at the start of the match.
Balls may be placed randomly by the instructor just prior to each match. Balls will not be moved or replaced once the match begins. The balls may not be touched or interacted with in any way by the students during the matches. There will be a variety of balls such as Ping-pong and golf balls that the robots can pick up and score through the goals. All balls will be worth the same points. There will be obstacles in each quadrant of the arena (similar to a pin-ball bumper,1” tall). Obstacles will be attached to the playing surface.
Matches will be conducted as follows:
The arena is not perfect and your robot design should make allowances for this. The dimensions of the arena and goals are approximate. The floor has seams that your robot may get caught on.
Balls may be placed randomly by the instructor just prior to each match. Balls will not be moved or replaced once the match begins. The balls may not be touched or interacted with in any way by the students during the matches. There will be a variety of balls such as Ping-pong and golf balls that the robots can pick up and score through the goals. All balls will be worth the same points. There will be obstacles in each quadrant of the arena (similar to a pin-ball bumper,1” tall). Obstacles will be attached to the playing surface.
Matches will be conducted as follows:
- Each match will last 3 minutes.
- There will be 4 robots in the arena at a time. They can block each other, etc.
- The pool play matches is pre-determined, and the team #s are decided when they qualify.
- The width of goal will be ~ 9 inches.
- IR Beacons exist at the top of each goal.
- The balls will have a diameter equal to or smaller than golf balls.
The arena is not perfect and your robot design should make allowances for this. The dimensions of the arena and goals are approximate. The floor has seams that your robot may get caught on.
- There is approximately a 3 inch gap between the end of the line and the goal.
- The black lines are taped lines using standard electrical tape or printed of similar width.
- The unpainted square, triangular and circular obstacles are made from wood.
- The obstacles will not be within 4 inches of the line.
Contest Rules
- The robot must be powered by electrical storage batteries. No other power sources will be allowed. Theses batteries must be sealed and all possible precautions must incorporated into the design to prevent accidental spills. The judges may disqualify any design that is determined to be unsafe.
- Robots may have other energy sources that are without energy at the beginning of competition. These sources must get their energy from the batteries. (A spring pulled back by an electric motor is acceptable.)
- Prior to the match, students get 5 seconds to set up and calibrate the robot. Once the match starts, you cannot touch the robot, except to turn it off to prevent damage and/or save batteries.
- Robots cannot exceed 10 lbs.
- The robots have a maximum initial static size of 7inx7inx7ft. The footprint should be 7in
by 7 in at the beginning of the match, with a maximum height of 7 ft. Once the competition starts, the robot could have a footprint size larger than 7 in by 7 inch, and taller than 7 ft. - Robots are allowed to tip over other robots.
- Robots are allowed to collect multiple balls at one time.
- The robot drive wheels must be non-destructive to the playing surface.
- The robot may not have a remote on/off switch.
- At the beginning of the competition with the switch in the off position, the robot handlers
will position their robot as instructed by the judges. - At the command of the judge, the handlers will turn their start switch to the ‘on’ position.
- Robots that leave the field may not continue play unless they re-enter the field
autonomously. - Robots that have stalled may be turned off by a team member if desired to save battery
life. The stalled robot will stay on the field in the stalled position to the completion of the
match. - Matches may end before the 3 minutes period if all teams concede further play.
- Robot Numbering rule: 3 digits in total, first 2 digit are section number, 3rd digit are team
number. For example, 01-1 means Robot #1 in class Section 1. - There will be a Robo Sockey Midterm Competition and Robo Sockey Final Competition
with a qualifier before each of the competition respectively. Any robot fails the qualifier will not be allowed to participate the corresponding competition. The Midterm Competition will be within each class section, and Final Competition will be held including all EGR 107 sections. - Final Competition stages:
- For a Robo Sockey competition that has n team (n <16) there will be two stages:
- Pool-play (all teams), Final (top 4).
- For a Robo Sockey competition that has n teams (n ≥16), there will be three stages: Pool play (all teams), semi-final (top 50% teams), Final (top 4).
- For a Robo Sockey competition that has n team (n <16) there will be two stages:
- The final match schedule will be posted on BlackBoard.
- Scoring:
Controlled ball score – 5 pts.
Any other score – 1 pt. - A score is awarded to the robot that sets the ball in motion. Other robots are considered to
be obstacles and do not earn the score if the ball happens to bounce off of them. If a ball rolls to a stop, it will again be available for scoring by another robot. If a robot securely captures a ball in motion, the robot that sets it in motion will not be credited for any subsequent score. - Any robots that do not score during Pool play do not advance to Semi-Final (if applicable) or Final Rounds.
Any robots that do not score during Semi-Final do not advance to Final Rounds. - NO time outs for POOL play. Teams may skip their round to make repairs for the next round, at the discretion of the judges.
- Break between matches:
For pool play, 2 minutes break between rounds.
For Final and Semi-Final rounds, 5 minutes break between rounds. Any team that is not ready at the end of the break may be disqualified by the judges for that round.
Special Cases Rules
- Tie breaker:
Tie breaker at the end of pool play and semi-final for further advancing robots: If tie ranking happens at the end of pool play that determines entry into the next round of play during pool play (16th place) or the semi-final (4th place), the tie-breaker will be by sudden death. Then if a tie still exists, the advancing robots will be determined by a coin toss. - Tie breaker at the end of pool play and semi-final for non-advancing robots: If a tie happens at the end of pool play or semi-final, among the robots that did not enter the next competition stage, the tied robots will take the average of the tied position.
- Tie breaker at the end of Final stage: If a tie happens at the end of Final rounds, sudden death is activated.
- Sudden death:
All tied robots start in front of the goal, facing the center of the arena, on the centerline of the arena. The back surface of the robot must be aligned with the wall of the arena. Ranking is decided by the order of successful scoring. If at the end of 1 minute, there is no winner, points will be split between the tied robots. No appeal is available for this decision.
Build Regulations
- Students work in a team with 3-5 people as determined by the instructor.
- Each robot must incorporate at least one major part that is designed by the team and machined using the mills in KEN 250/252.
- Each robot will use the Arduino Uno board(s) for the sensor, motor control and any other computations required. An Arduino Mega board may be used as well, but must be included in the budget (Arduino Uno is considered free as stated below).
- Each robot is autonomous, battery operated. No remote controls or tethers are allowed.
- Each robot will be started and stopped with a clearly labeled and easily accessible switch.
- Prohibited materials are listed below:
- Cardboard or Paper
- Tape of any form (duct, electrical, masking, etc.) One exception: Electrical tape may be used to insulate an electrical connection. It may not be used as a method of joining items.
- Reclaimed materials, unless they are available on a wide scale and a cost can be reasonably established. For example, beverage containers are widely available and could be priced at 10 cents each (MI bottle deposit), but used electronicsfound on Craig’s List have inconsistent pricing and availability. Instructor approval must be gained for use of reclaimed/used items.
- Legos, knex, erector sets, tinker toys and the like.
- Wire ties: except to neaten wire bundles or where NOT used to attach two items together.
- Hot glue, super glue, or glue of any kind.
- Rubber bands may NOT be used to attach items together, but may be used for other purposes.
- Velcro, except where used to attach a removable item such as a battery.
- Budget: Maximum of $80 per team for materials (including batteries) ~not including the items in the (4) kits owned by team members (Maximum of two Arduinos are exempt from the budget). Nothing is free; the retail price is to be used for all materials and components
- The budget only includes materials that would be used to build an additional robot. Support materials that you use to help build your robot or parts that were purchased for concepts that did not work do not count towards the $80.
- 3D printed parts: $50/kg. You need to get a written permission from your professor to use the KEN lab 3D printer. The grant of permission also depends on the availability of the lab.
- Manufacturing costs do not need to be considered.

